Going deep with openROV
BRCK has a great relationship with the folks over at openROV, the creators of underwater exploration robots. They set us up with one of their units and we jumped at the opportunity to test it on our expedition to Uganda.
The openROV is a low cost, open source platform that creates some pretty great opportunities for underwater exploration. Since both the hardware and software are open source it allows all the members of the openROV community to get involved in improving the design. The extra long cable allows for exploring areas deeper than one can scuba dive while the on-board camera provides a first person perspective while operating the openROV. Read more about it at www.openROV.com.
The standard configuration uses an Ethernet and USB cable to connect to a communications module which connects to the openROV via a 100m long pair of wires. The BRCK provides both those connections so that got us wondering if we could WiFi bridge to a BRCK connected to the communications module.
The openROV unit only arrived in Nairobi 48 hours before we left for Uganda so we had to wait until we got to Uganda to start playing around. Unfortunately we did not have any software developers on this expedition. What we did have was Johnny Long, a professional hacker with 15 years of experience and many, many connections to other hackers (in this case Rob Fuller, aka Mubix). Within an hour of explaining the idea to they had the BRCK reconfigured to be a WiFi bridge to the openROV. We were all smiling like it was Christmas morning as we loaded the openROV Cockpit and saw the first video from the robot’s camera, made the motors spin, lights turn on and flashed the lasers – yes, the openROV comes with lasers!

The idea was that the BRCK and the openROV communications module could float in a Pelican box at the surface of the water with the control cable going down to the openROV. With that configuration the laptop simply needed to be anywhere in WiFi range of the BRCK and we would be good to go.
Testing it out on the water was not without its issues. With the late arrival of the unit we did not have enough time to properly ballast our unit ahead of time. The weights we had with us (carabineers and Land Rover lugnuts) were either too light or too heavy but eventually we got it approximately weighted. And, while the 100m wire potentially allows for some great exploration, it also means that some wire management is required. We spent about 45 minutes bobbing up and down on Lake Victoria dealing with wire and getting it wrapped properly around a piece of cardboard so we could do some testing. However, in the end we did get it sorted out and running in the water.




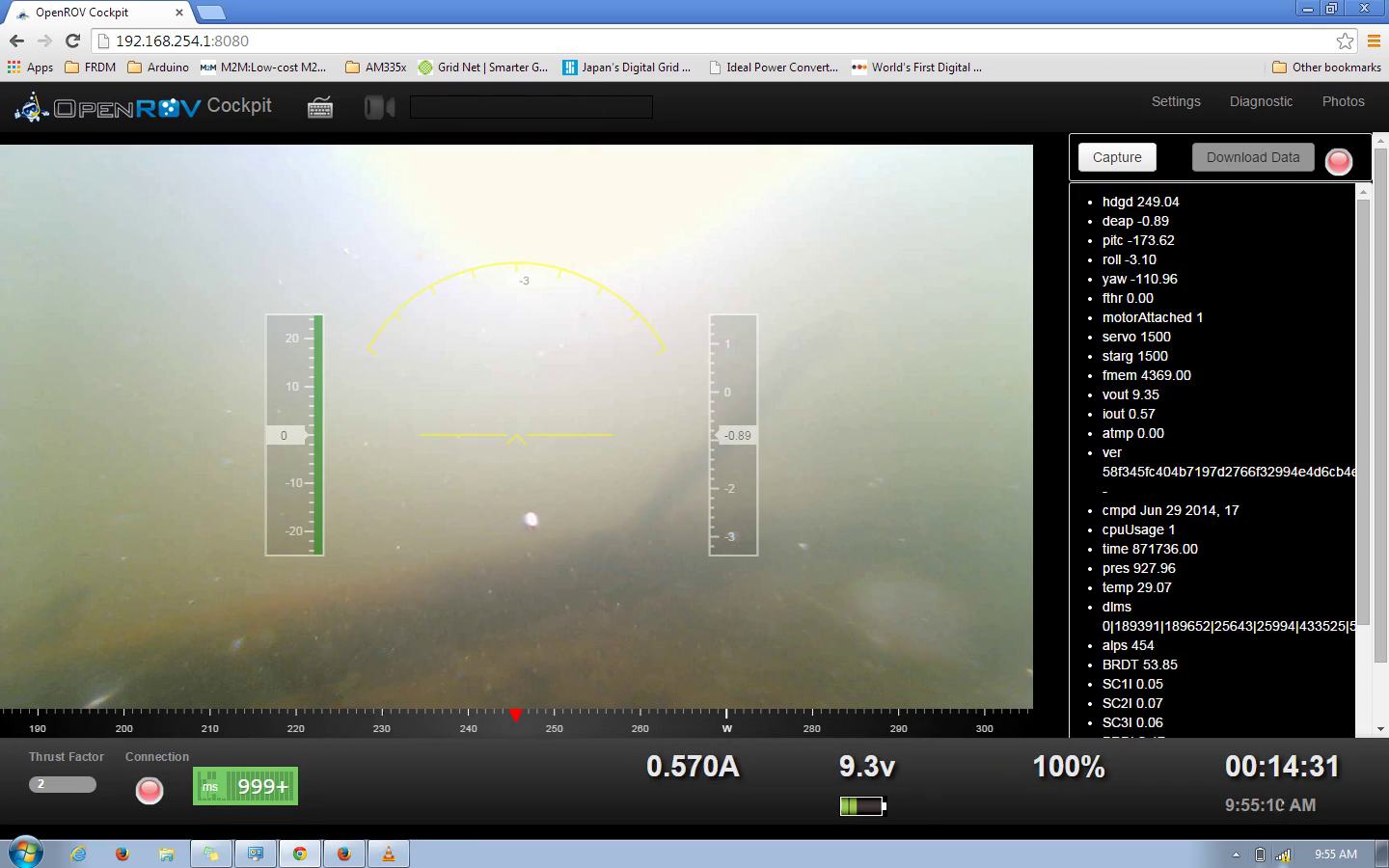
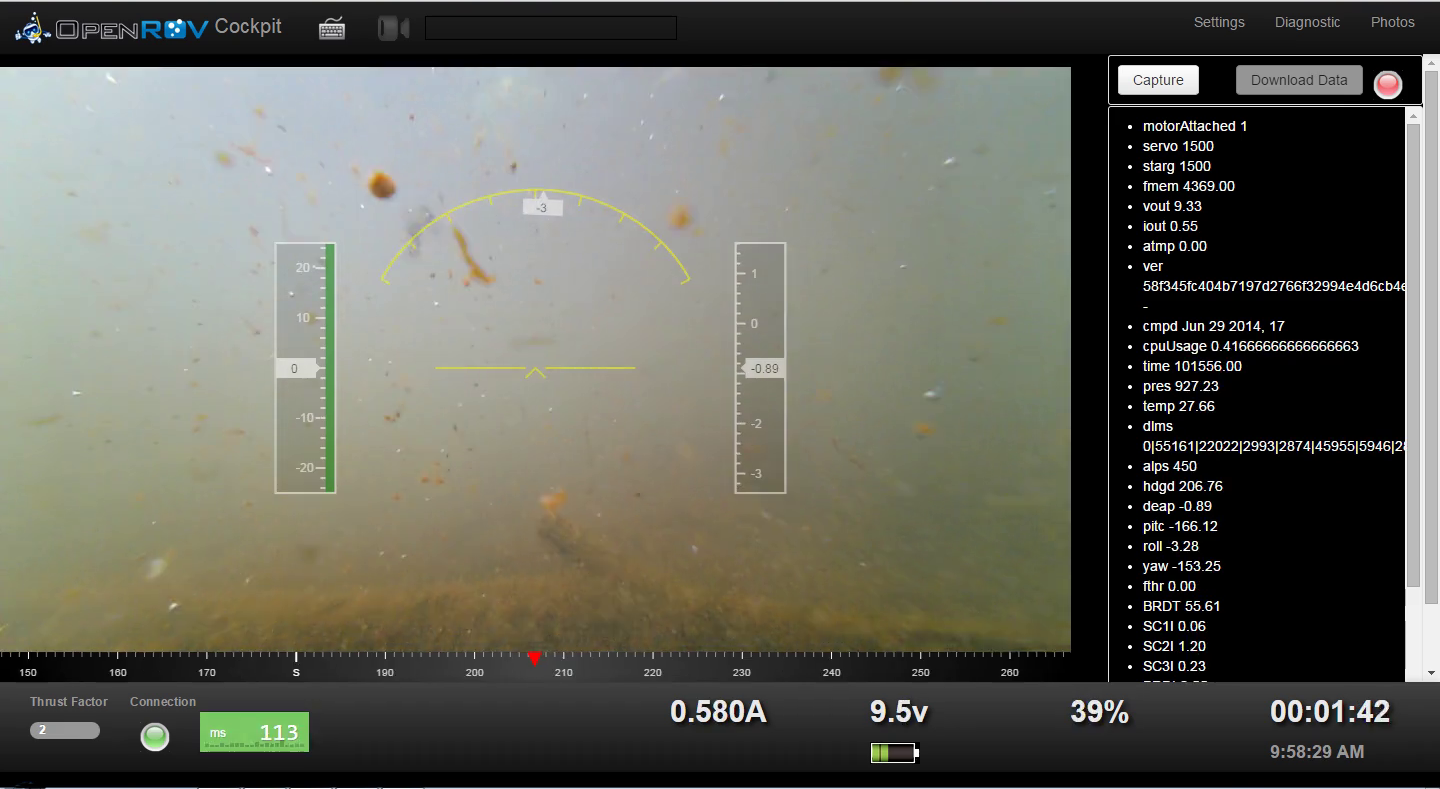
We also were able to test it a bit on some still sections of the Nile; almost certainly the first for an openROV unit! Here are a few screenshots from the cockpit.
We recorded our whole trip with OpenExplorer, an awesome platform for tracking and publishing self-made adventures of any sort. You can see the whole timeline at https://openexplorer.com/expedition/brckexpedition2014. OpenExplorer provides a very intuitive interface to publish updates and media generated during trips such as these. So whether you are hiking the West Coast Trail, exploring shipwrecks on the Amazon or rafting the Nile I would highly recommend having a look at OpenExplorer to let others know what you are up to.